
咨询热线:
17715390137
18101240246
18914047343
邮件:mxenes@163.com
扫码关注或微信搜索公众号:
二维材料Fronrier
关注后点击右下角联系我们,
进入企业微信。
专业服务在线



环境和全球能源危机对清洁能源提出了需求。在这种情况下,氢成为最有前途的能量载体,而电催化析氢反应是一种有效的制氢方法。而基于Pt的电催化剂成本过于昂贵,发展低价高效的电催化剂是十分有必要的。
影响因子70+,水凝胶再登顶刊:3D打印如何在生物医学中大显身手?
原创 Glenn 奇物论 昨天
第一作者:Zhijie Zhu
通讯作者:Hyun Soo Park, Michael C. McAlpine
通讯单位:美国明尼苏达大学
一、研究亮点
(1)概述了3D打印的功能油墨,重点是电子材料和水凝胶。
(2)人工智能驱动的3D打印的最新进展,包括开环、闭环和预测系统;
(3)讨论了手术机器人平台。
二、研究背景
3D打印技术自20世纪80年代初开始发展,范围从复杂塑料结构的熔融丝制造到下一代技术,如直接墨水书写和喷墨打印。后一种方法可以将硬塑料以外的一系列功能材料交织在一起,如导体、半导体、仿组织软材料和生物材料(图1a)。凭借其固有的可定制性和快速原型制作,3D打印为制造个性化的人造或仿生器官和智能可穿戴设备提供了潜力。
尽管具有上述潜力优势,3D打印的多功能可穿戴设备和植入设备仍处于早期开发阶段。其面临的挑战在于两点:(1)配制在印刷后显示出功能性,并且与其它油墨相容的油墨,以用于制造复杂的多功能结构;(2)传统的印刷平台对所施加的目标表面是“盲”的,这是因为非原位印刷的本质:通常在平面和水平的基底上制造规定的设计,然后通过粘合剂转移到目标上。规避这些缺点的一种方法是利用人工智能驱动的微创3D打印技术,直接在目标表面上制造。
这里定义的人工智能不仅包括机器学习,还包括一个更广泛的自动系统类别,它可以传递“理解”或“思考”(图1b),例如计算机视觉系统,它可以可靠地检测、跟踪和识别目标印刷表面,检查印刷质量和诊断印刷状态。此外,人工智能驱动的打印可以从过去的经验中学习,以预测可能的未来状态,从而对快速移动和变形的目标做出快速反应。
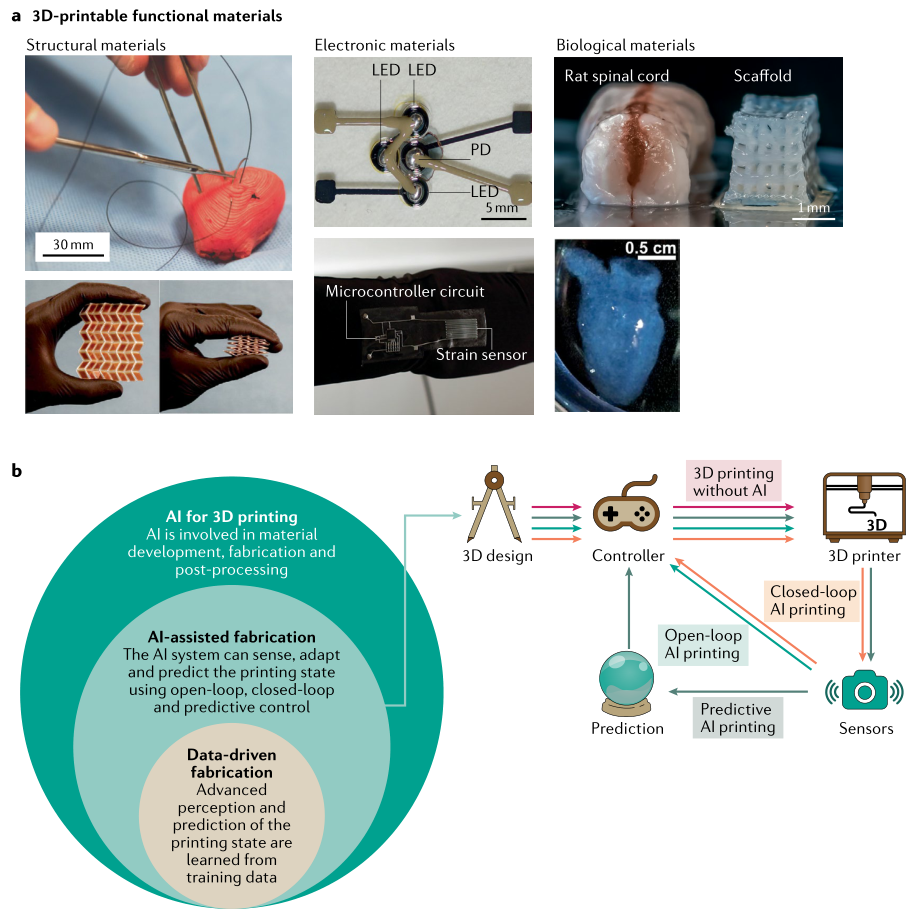
图1 人工智能辅助制造技术支持的3D打印功能材料和器件概述。
三、核心内容
近日,美国明尼苏达大学Hyun Soo Park、Michael C. McAlpine团队以“3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies”为题,在Nature Materials Review上发文,讨论了用于原位3D打印的电子和生物墨水,具有开环、闭环和预测控制的人工智能增强的3D打印方法,未来外科机器人和人工智能也可集成3D打印方法。人工智能、3D打印、功能材料和个性化生物医学设备的融合将为智能制造带来引人注目的未来。
四、综述要点
1. 人工智能辅助3D打印的关键研究
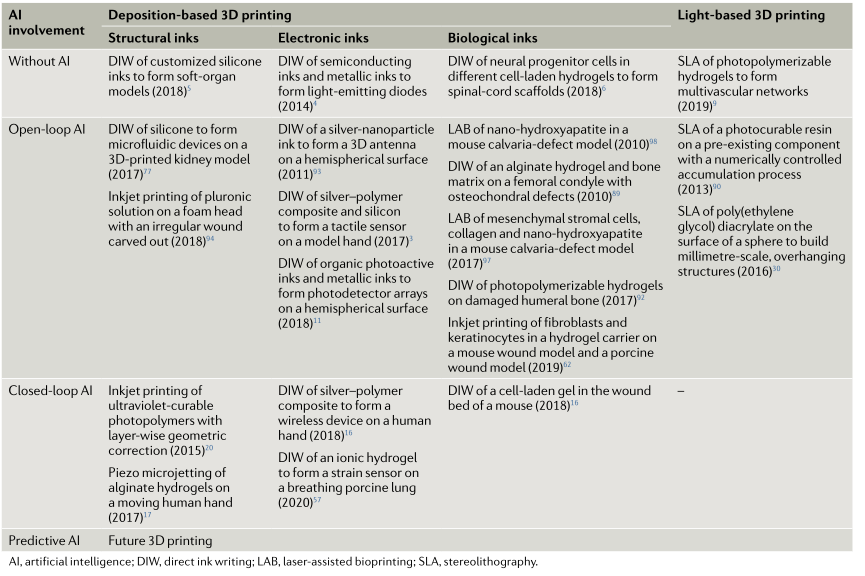
在无人工智能的传统3D打印系统之外,作者重点关注反馈控制系统背景下,打印过程中人工智能的三个层次,以补偿目标形状和运动的复杂性和不确定性:开环人工智能、闭环人工智能和预测人工智能。表1总结了人工智能各个层次的结果。注意,带预测AI的3D打印这一排还是空的,揭示了一个广阔的研究领域。
表1 人工智能辅助3D打印的关键研究总结
2. 3D打印用功能性油墨
3D打印材料需要与相应的3D打印方法兼容,3D打印方法通常分为基于光或基于沉积。基于光的3D打印方法包括选择性激光烧结、立体光刻和数字光投影,这些方法通常对油墨的光响应性(它们的光交联或烧结能力)以及印刷平台的格式有严格的限制。已经开发了更多具有保形印刷能力和可更换油墨的多功能光基印刷平台,以实现多种材料的原位印刷。基于沉积的印刷方法,例如直接墨水书写和喷墨印刷,是基于材料的液滴或细丝的按需沉积,以在自由空间中形成3D结构。它们能够使用多个挤压头进行多材料印刷,挤压头连接到装有具有各种性质(例如导电、半导电和生物墨水)和物理形式(例如细丝、凝胶、液体、悬浮液和粘性溶液)的墨水容器。不同于传统的基于光的印刷操作需要材料桶,基于沉积的印刷方与活体内部的原位制造有着固有的兼容性。
2.1 电子材料
用于电子器件原位3D打印的材料应满足某些要求:显示实现诸如传感、光电、和驱动等功能所需的电特性;具有与目标生物表面相匹配的机械特性,以获得机械顺应性;表现出适当的流变特性,以实现可预测的行为和材料沉积的空间控制;在制造过程中和制造后保持与目标生物表面的非刺激性界面
2.2 水凝胶
可与软组织和器官相接触的3D打印材料对于特定患者的功能支架、生物相容性粘合剂以及一些电子可穿戴设备和植入物至关重要,其中,水凝胶是3D打印生物界面的理想候选材料。与生物组织相似,水凝胶是渗透了水的粘弹性聚合物网络,可用于组织工程和生物电子学应用。它们满足原位3D打印生物界面的主要设计目标:如果基于生物聚合物如胶原蛋白、纤维素和明胶,或基于生物聚合物-二氧化硅杂化材料,它们可以为细胞存活和增殖提供合适的支持;它们类似于天然细胞外基质,具有组织样的柔软性和粘弹性,可以通过改变聚合物网络的孔隙率和液相的粘度来调节;可以调整它们的界面性质,使它们既能粘附在湿组织上,又能粘附在电子器件中常见的各种固体表面上;通过添加光引发剂,它们的交联行为可以针对基于光的印刷方法进行优化;可以通过添加流变改性剂来优化它们的流变性能,以用于基于沉积的印刷方法。
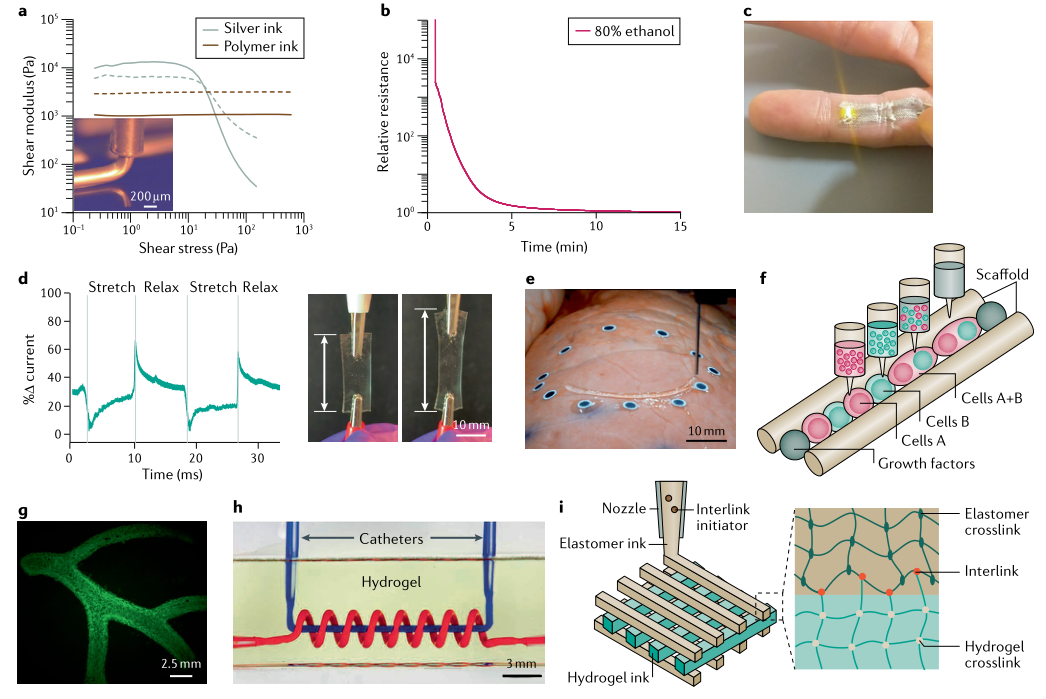
图2 用于原位3D打印的功能油墨。
3. 用于3D打印的开环人工智能
开环3D打印依赖于在制造过程(离线)之前获取目标表面几何信息,人工智能使用该几何信息来确定刀具路径设计和材料分布。表2总结了用于捕捉目标表面几何形状,以辅助3D打印的一些3D感测方法。目标表面几何形状的3D重建,通常使用带有传感器的复杂算法离线执行,诸如计算机断层扫描、激光扫描和结构光扫描仪的传感器。然后,可以相对于打印平台校准几何图形,并且可以生成用于在目标表面上直接打印的保形刀具路径的轨迹。在目标表面不作为保形印刷的支撑基底的情况下,例如对于将插入再生植入物的受损神经通路,人工智能可以使用先前扫描的库或不完整解剖结构的扫描数据来重建,用于3D印刷制造的植入物的患者特定模型。
表2 辅助3D打印的常见3D感测方法

更有趣的是,考虑到变形材料的最新进展,基于模型的4D印刷可编程结构的研究可以实现对植入物的精确、可预测的形状控制,以获得例如刺激响应植入物,当制造用于微创植入时,该植入物在尺寸上是紧凑的,并且在部署到目标位置后膨胀以填充目标空间,或者随着身体愈合而而变形。
3.1 非平面表面上的保形3D打印
为了在静态非平面表面上实现直接打印,人工智能必须在打印过程之前获取目标的几何信息。我们将这种离线感应能力的人工智能驱动的3D打印,定义为开环3D打印。在非平面的、预先存在的表面上进行保形打印,不仅可以用基于沉积的3D打印,还可以用基于光的打印方法,例如立体光刻。
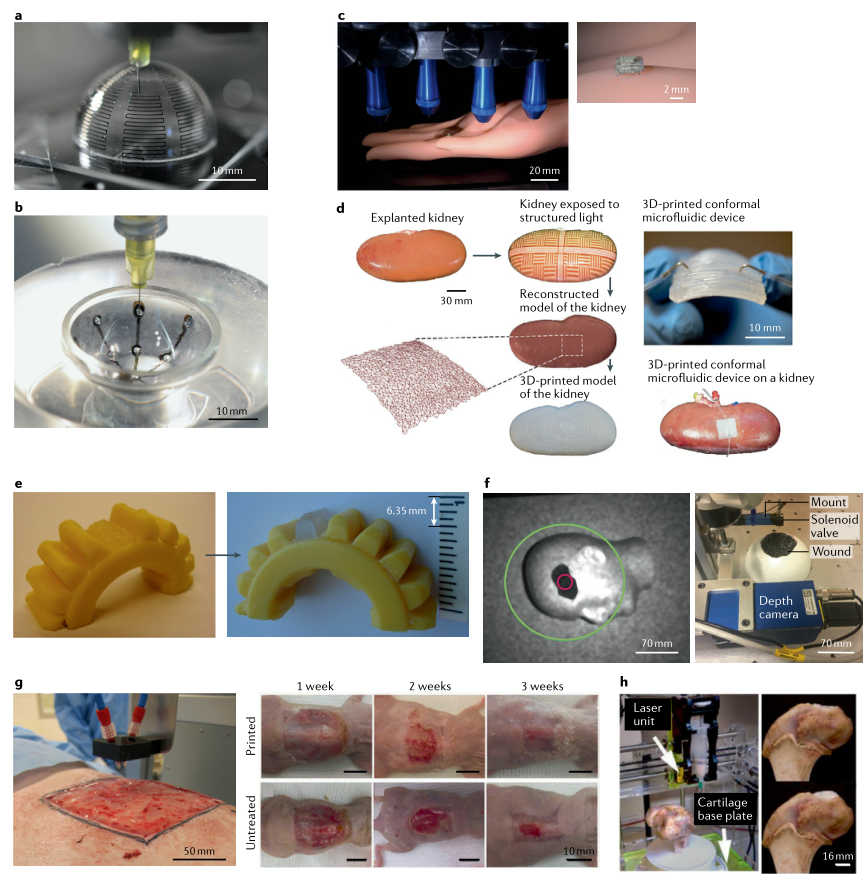
图3 非平面表面上的保形3D打印。
3.2 基于目标几何的形状设计
可穿戴医疗植入物可以直接3D打印在人体上,以实现临床诊断或帮助伤口恢复。活性材料或无源材料在引导变形下的形状可编程性,可以进一步扩展3D打印设备的功能。形状设计或形状变形指的是,设计内在(例如热膨胀和膨胀)和外在(例如介孔结构和不均匀材料分布)材料特性,以在特定刺激(例如温度、离子浓度和/或机械负载的变化)下实现规定的形状变化。
在二维或三维尺度上,混杂交织材料的能力使得3D打印成为实现形状编程设计的理想制造方法,其可以结合到原位3D打印的医疗可穿戴设备中,通过补偿身体运动(例如关节运动和组织变形)来增强设备的鲁棒性和耐用性。
通过获取可变形目标表面的扫描图像,预测打印环境中的不确定性以及功能墨水的非线性特性,人工智能有利于符合身体运动的可穿戴设备的设计和打印。在3D打印中,使用人工智能进行形状编程被认为是一个开环过程,因为人工智能是在设计阶段,而不是打印过程中使用的。

图4 基于目标几何形状的程序编制。
4. 3D打印闭环人工智能
闭环人工智能打印是指对操作环境的变化(如目标表面的运动和变形、打印缺陷、油墨流量控制和喷嘴功能)进行实时(在线)适应的3D打印。基于检测、跟踪和识别算法,可以在打印过程中更新目标几何形状和运动、打印层的表面拓扑形貌和打印头的挤压状态。作者在本部分首先讨论了闭环人工智能的两个主要功能:通过在线校正提高打印质量和通过在线跟踪在运动目标上原位打印。随后,机器人感知作为一种核心感知技术被讨论,它可以实现闭环3D打印。
4.1 提高打印质量
由于打印环境中的干扰(例如温度变化和振动),以及材料特性(例如油墨粘度和材料形态)和机械行为(例如驱动机构中的运动误差)中的不确定性,需要闭环控制以在原位3D印刷期间,实现材料分布的精确空间处理。照相机和应变仪等各种传感器已被集成到3D打印平台中,以观察进料系统和打印结构的状态。传感数据被送到计算工具,如计算机视觉和机器学习算法,以识别打印缺陷,并向材料输送和运动控制系统提供反馈,以纠正印刷错误。闭环人工智能提高了打印质量,并在质量控制的工业制造中开辟了新的机会,包括制造高精度零件。
4.2 移动目标上的3D打印
生物系统本质上是动态的。因此,对于原位3D打印,目标生物表面通常不能完全固定。例如,活体中的皮肤和软器官发生变刚性变形和非刚性变形,这些变形由呼吸、心跳和外科手术(例如气体吹入)引起。在这些动态变化的几何图形上进行原位打印,需要通过基于传感数据的在线更新来调整刀具路径。
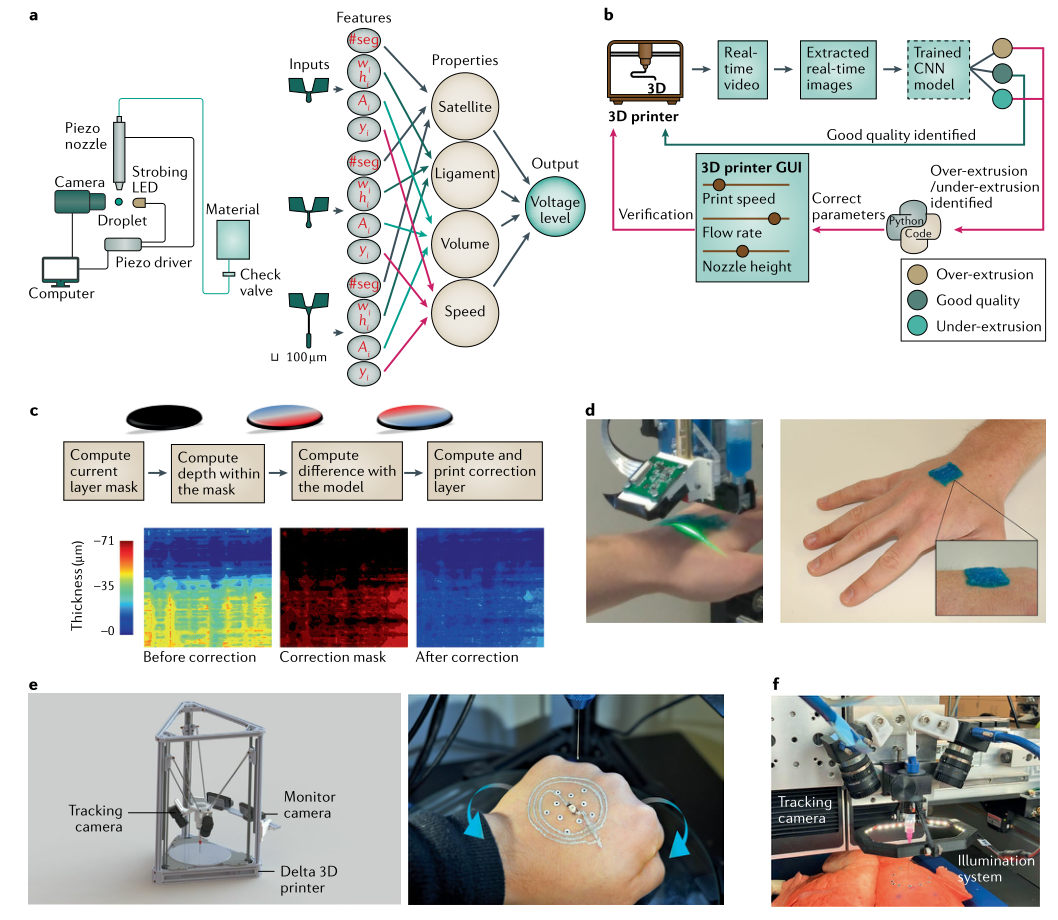
图5 具有闭环校正的3D打印和移动目标上的3D打印。
4.3 用于原位3D打印的机器人感知
为了在人体脆弱的器官和组织上安全地进行3D打印,可以使用3D打印机和“机器人外科医生”的混合体。这种混合体应该具备感知能力,能够识别器官组织的几何形状和机械特性,以及动态系统中的干扰和不确定性。感知几何属性(如表面变形和运动)与实现打印过程的空间控制直接相关。与用于实时3D重建的医学成像方法,如磁共振成像和CT相比,基于视觉的感测方法不需要庞大的数据采集设备,因此,可以集成到微创手术机器人中,使用小型图像传感器(如内窥镜摄像机)来帮助在人体上或人体内进行原位手术。
在文中,作者区分低级和高级视觉感知系统,并分别对它们进行了讨论。低级感知类似于人类的视觉感知,它利用成像系统和图像处理算法来检测捕获图像中的视觉特征,例如颜色和纹理,以进行3D重建。高级感知类似于大脑和神经系统的感知;在3D打印中,它理解由低级感知重建的3D场景的语义,用于后续的刀具路径规划。

图6 用于原位3D打印的机器人感知。
5. 3D打印的预测人工智能
在活体器官或生物体上进行3D打印的能力,从根本上受到传感、控制和计算固有延迟的限制。3D打印机器人无法响应组织表面的变形可能会导致机器人设备碰撞或刺入组织,从而影响打印质量、损坏组织,并导致安全问题。这需要预测性人工智能,它不仅能理解当前的状态,还能根据过去的经验预测未来的状态,预测周围组织的未来变形,并为有效减少或消除打印错误的未来命令进行规划。未来的3D打印机器人可以配备,由复杂的机器学习算法训练的预测人工智能,这将使打印更加适应、交互式和准确。
6. 用于原位3D打印的手术机器人
在医学领域,原位3D打印可用于通过精确的空间控制,将具有所需电、化学和生物功能的生物材料直接输送到人体。这可以在很多方面帮助现代医学治疗,比如用外科胶水代替缝合线,为神经接口植入电极阵列,用工程细胞打印生物支架来修复或替换受损组织。已经开发了复杂的手持式打印工具,用于将两个生物链接同轴打印成壳-核结构(图7a)和打印多层薄膜皮肤移植物(图7b)。这些打印工具目前用于在固定的3D结构中打印有限类型的墨水,并且目前受限于人体解剖结构的不同部分容纳多用途材料的能力。
另外,在不同的打印场景中,与手动操作相关联的打印质量是不一致的。相反,目前用于3D打印行业的机器控制打印平台不能完全满足现场材料要求。它们建立在XYZ构台系统或三角机器人的基础上,通常具有较大的外形尺寸,打印工作空间封闭在框架结构中。这种类型的3D打印机适用于表皮手术,如纹身和在开放伤口上打印皮肤细胞,但这些3D打印机的大尺寸不适合体内手术。
与3D打印的发展同步,自1980年1999年以来,机器人辅助管理信息系统技术一直在发展,并提供了一个可行的平台,以在人体深处的不同部位(如神经系统和腹部)执行原位3D打印,用于组织修复、药物输送和功能性添加。这些机器人平台具有先进的传感(如视觉和力反馈)和精确的运动控制能力,可以实现“更智能”的手术,以减少因医疗错误造成的死亡或受伤。

图7 用手术机器人进行3D打印。
五、小结
尽管,在这篇综述中讨论的3D打印技术显示出巨大的希望,但是人工智能集成仍然处于初级阶段,我们仍然缺乏3D打印机器人和普通用户之间的智能交互界面。人工智能不仅要了解打印环境的状态,还要了解打印任务,并与人类专家甚至新手共享控制权,人工智能应该与这些人进行密切的交互,这将有助于识别目标的物理属性,以重新设计打印方案,从而精确操作手持打印机,并在线评估打印质量以完成任务。当增强现实和虚拟现实等新界面被集成到3D打印过程中时,人工智能将指导整个端到端的过程,从计算设计到基于大型人机交互数据库的特定目标输出。作者认为这种交互式3D打印是走向多功能3D打印普适应用的重要方向。
六、参考文献及原文链接
[1] Zhijie Zhu, et al. 3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies, Nature Reviews Materials, 2020.
DOI: 10.1038/s41578-020-00235-2
https://www.nature.com/articles/s41578-020-00235-2
生物医学与工程微信群
加微信群方式:添加编辑微信 18965840059,备注:姓名-单位-研究方向(无备注请恕不通过),由编辑审核后邀请入群。
生物医药学术QQ群:1033214008
生物材料学术QQ群:1067866501
可穿戴器件学术QQ群:1032109706
分析传感学术QQ群:530727948
仿生材料学术QQ群:111658060
高分子材料学术QQ群:1053468397
来源:奇物论
本信息来源于互联网仅供学术交流,如有侵权请联系我们立即删除。
 |
 |
 |
 |
| 二维材料Frontier | 生物纳米材料前沿 | MXenes Frontier | 纳米医学Frontier |
|
版权所有 © 2019 北京北科新材科技有限公司
All rights reserved. 京ICP备16054715号-2 |
扫一扫
